LeetCodeCampsDay60图论part10
LeetCodeCampsDay60图论part10
94.城市间货物运输 I
https://kamacoder.com/problempage.php?pid=1152
题目描述
某国为促进城市间经济交流,决定对货物运输提供补贴。共有 n 个编号为 1 到 n 的城市,通过道路网络连接,网络中的道路仅允许从某个城市单向通行到另一个城市,不能反向通行。
网络中的道路都有各自的运输成本和政府补贴,道路的权值计算方式为:运输成本 - 政府补贴。权值为正表示扣除了政府补贴后运输货物仍需支付的费用;权值为负则表示政府的补贴超过了支出的运输成本,实际表现为运输过程中还能赚取一定的收益。
请找出从城市 1 到城市 n 的所有可能路径中,综合政府补贴后的最低运输成本。如果最低运输成本是一个负数,它表示在遵循最优路径的情况下,运输过程中反而能够实现盈利。
城市 1 到城市 n 之间可能会出现没有路径的情况,同时保证道路网络中不存在任何负权回路。
输入描述
第一行包含两个正整数,第一个正整数 n 表示该国一共有 n 个城市,第二个整数 m 表示这些城市中共有 m 条道路。
接下来为 m 行,每行包括三个整数,s、t 和 v,表示 s 号城市运输货物到达 t 号城市,道路权值为 v (单向图)。
输出描述
如果能够从城市 1 到连通到城市 n, 请输出一个整数,表示运输成本。如果该整数是负数,则表示实现了盈利。如果从城市 1 没有路径可达城市 n,请输出 “unconnected”。
输入示例
1 | 6 7 |
输出示例
1 | 1 |
提示信息
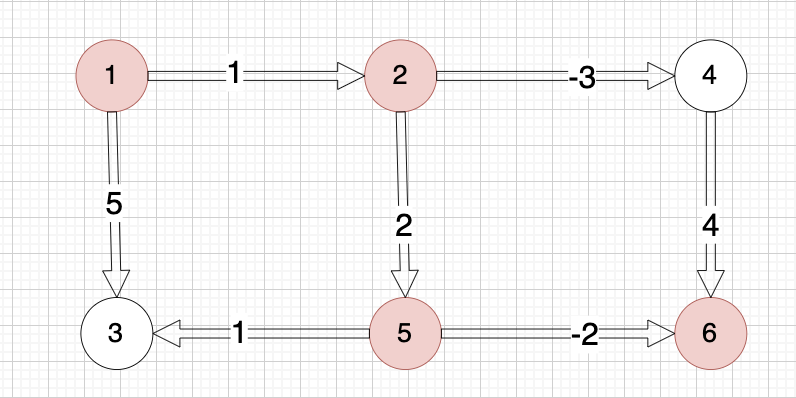
示例中最佳路径是从 1 -> 2 -> 5 -> 6,路上的权值分别为 1 2 -2,最终的最低运输成本为 1 + 2 + (-2) = 1。
示例 2:
4 2
1 2 -1
3 4 -1
在此示例中,无法找到一条路径从 1 通往 4,所以此时应该输出 “unconnected”。
数据范围:
1 <= n <= 1000;
1 <= m <= 10000;
-100 <= v <= 100;
Bellman-ford优化思路
观察之前的代码,可以发现在遍历阶段可以优化,
1 | def main(): |
原代码的遍历条件是需要遍历(n-1)次,并且每次都要对整个graph遍历,虽然使用了minDist[s] != float(‘inf’)和minDist[s] + v < minDist[t]这个条件来筛选更新对象,这样的思路虽然简单(可能也不简单?),但增加了很多无效遍历
输入的边为以下
1 | 5 6 -2 |
比如刚开始minDist[1]=0,
- edge信息为(s=5, t=6, v=-2),此时minDist[s]为正无穷,不是要找的源点
- edge信息为(s=1, t=2, v=1),
此时minDist[s]为0,说明找到了源点,再进行“relax”,即对经过源点(1)能到达的终点(2)进行路径距离更新,如果minDist[s] + v < minDist[t],说明经过源点s再到终点t是距离更近的 - edge信息为(s=5, t=3, v=1),此时minDist[s]为正无穷,不是要找的源点
- …
- edge信息为(s=1, t=3, v=5),
此时minDist[s]为0,说明找到了源点,再更新终点(3)的距离
这仅是一轮遍历,可以发现这么一次搜索,仅有找到了两次源点,而其它的都是无效的
此外,假如minDist[1]=0已经更新完成,此时i=2,即源点=2
- edge信息为(s=5, t=6, v=-2),此时minDist[s]为正无穷,不是要找的源点
- edge信息为(s=1, t=2, v=1),此时minDist[s]不为正无穷,但**minDist[s] + v < minDist[t]**已经不满足条件了,因为minDist[2]已经等于minDist[1] + 1,不是要找的源点
- edge信息为(s=5, t=3, v=1),此时minDist[s]为正无穷,不是要找的源点
- edge信息为(s=2, t=5, v=2),
此时minDist[s]为0,说明找到了源点,再进行“relax”,即对经过源点(2)能到达的终点(5)进行路径距离更新 - …
这仅是一轮遍历,可以发现这么一次搜索,仅有找到了两次源点,而其它的都是无效的
和dijkstra优化思路相似,可以使用一个邻接表+队列来控制哪些元素需要被遍历,从而减少无效遍历
graph需要使用邻接表,其中s作为下标索引,而存储的是 <t, v> 这个结构体列表
1 | class Edge: |
比如,输入的边会变成下面这样的邻接表
1 | 1 [<2, 1>, <3, 5>] |
先将起点1添加到que中,若que不为空则一直弹出元素s,并对graph[s]遍历,注意graph[s]是个列表,里面是与它相连的终点
更新到每个终点的距离
这里还有个优化过程,如果某个终点已经达到过了,则不让它反复添加到队列里,设置个inQue即可
1 | inQue = [False] * (n + 1) |
简单来说,如果不添加inQue之所以在某些情况下能通过,是因为那些测试用的图不包含负权回路。但是,这个代码存在一个致命缺陷:一旦图中存在负权回路,它就会陷入无限循环。
所以,在后面95题目中,因为有负权回路,它必须要添加个inQue来判断
详细解释
在一个没有负权回路的图中(无论边权是正还是负),一个节点的最短路径值 minDist 虽然可能会被更新多次,但更新的次数是有限的。
想象一下,从起点到节点 X 的最短路径值为 10。后来你又找到一条路径,值为 8,于是你更新 minDist[X] 并将 X 放入队列。再后来,你又找到一条更短的路径,值为 5,你再次更新并放入队列。
因为没有负权回路,节点的 minDist 值会一直降低,但它有一个最终的、最低的“底线”。一旦所有节点的 minDist 都达到了这个底线值,就不会再有新的更新了 (if 条件不再满足),队列最终会变空,程序正常结束。
所以,对于有向无环图 (DAG) 或者没有负权回路的图,你的代码可以算出正确答案,只是效率可能不高。
Bellman-ford优化代码
队列优化版Bellman_ford 的时间复杂度 并不稳定,效率高低依赖于图的结构。
例如 如果是一个双向图,且每一个节点和所有其他节点都相连的话,那么该算法的时间复杂度就接近于 Bellman_ford 的 O(N * E) N 为节点数量,E为边的数量。
在这种图中,每一个节点都会重复加入队列 n - 1次,因为 这种图中 每个节点 都有 n-1 条指向该节点的边,每条边指向该节点,就需要加入一次队列。(如果这里看不懂,可以在重温一下代码逻辑)
至于为什么 双向图且每一个节点和所有其他节点都相连的话,每个节点 都有 n-1 条指向该节点的边, 我再来举个例子,如图:

图中 每个节点都与其他所有节点相连,节点数n 为 4,每个节点都有3条指向该节点的边,即入度为3。
n为其他数值的时候,也是一样的。
当然这种图是比较极端的情况,也是最稠密的图。
所以如果图越稠密,则 SPFA的效率越接近与 Bellman_ford。
反之,图越稀疏,SPFA的效率就越高。
一般来说,SPFA 的时间复杂度为 O(K * N) K 为不定值,因为 节点需要计入几次队列取决于 图的稠密度。
如果图是一条线形图且单向的话,每个节点的入度为1,那么只需要加入一次队列,这样时间复杂度就是 O(N)。
所以 SPFA 在最坏的情况下是 O(N * E),但 一般情况下 时间复杂度为 O(K * N)。
尽管如此,以上分析都是 理论上的时间复杂度分析。
1 | class Edge: |
拓展
这里可能有录友疑惑,while (!que.empty()) 队里里 会不会造成死循环? 例如 图中有环,这样一直有元素加入到队列里?
其实有环的情况,要看它是 正权回路 还是 负权回路。
题目描述中,已经说了,本题没有 负权回路 。
如图:

正权回路 就是有环,但环的总权值为正数。
在有环且只有正权回路的情况下,即使元素重复加入队列,最后,也会因为 所有边都松弛后,节点数值(minDist数组)不在发生变化了 而终止。
(而且有重复元素加入队列是正常的,多条路径到达同一个节点,节点必要要选择一个最短的路径,而这个节点就会重复加入队列进行判断,选一个最短的)
在0094.城市间货物运输I 中我们讲过对所有边 最多松弛 n -1 次,就一定可以求出所有起点到所有节点的最小距离即 minDist数组。
即使再松弛n次以上, 所有起点到所有节点的最小距离(minDist数组) 不会再变了。 (这里如果不理解,建议认真看0094.城市间货物运输I讲解)
所以本题我们使用队列优化,有元素重复加入队列,也会因为最后 minDist数组 不会在发生变化而终止。
节点再加入队列,需要有松弛的行为, 而 每个节点已经都计算出来 起点到该节点的最短路径,那么就不会有 执行这个判断条件if (minDist[to] > minDist[from] + value),从而不会有新的节点加入到队列。
但如果本题有 负权回路,那情况就不一样了,我在下一题目讲解中,会重点讲解 负权回路 带来的变化。
95.城市间货物运输 II
题目描述
某国为促进城市间经济交流,决定对货物运输提供补贴。共有 n 个编号为 1 到 n 的城市,通过道路网络连接,网络中的道路仅允许从某个城市单向通行到另一个城市,不能反向通行。
网络中的道路都有各自的运输成本和政府补贴,道路的权值计算方式为:运输成本 - 政府补贴。权值为正表示扣除了政府补贴后运输货物仍需支付的费用;权值为负则表示政府的补贴超过了支出的运输成本,实际表现为运输过程中还能赚取一定的收益。
然而,在评估从城市 1 到城市 n 的所有可能路径中综合政府补贴后的最低运输成本时,存在一种情况:**图中可能出现负权回路。**负权回路是指一系列道路的总权值为负,这样的回路使得通过反复经过回路中的道路,理论上可以无限地减少总成本或无限地增加总收益。为了避免货物运输商采用负权回路这种情况无限的赚取政府补贴,算法还需检测这种特殊情况。
请找出从城市 1 到城市 n 的所有可能路径中,综合政府补贴后的最低运输成本。同时能够检测并适当处理负权回路的存在。
城市 1 到城市 n 之间可能会出现没有路径的情况
输入描述
第一行包含两个正整数,第一个正整数 n 表示该国一共有 n 个城市,第二个整数 m 表示这些城市中共有 m 条道路。
接下来为 m 行,每行包括三个整数,s、t 和 v,表示 s 号城市运输货物到达 t 号城市,道路权值为 v。
输出描述
如果没有发现负权回路,则输出一个整数,表示从城市 1 到城市 n 的最低运输成本(包括政府补贴)。如果该整数是负数,则表示实现了盈利。如果发现了负权回路的存在,则输出 “circle”。如果从城市 1 无法到达城市 n,则输出 “unconnected”。
输入示例
1 | 4 4 |
输出示例
1 | circle |
提示信息
路径中存在负权回路,从 1 -> 2 -> 3 -> 1,总权值为 -1,理论上货物运输商可以在该回路无限循环赚取政府补贴,所以输出 “circle” 表示已经检测出了该种情况。
数据范围:
1 <= n <= 1000;
1 <= m <= 10000;
-100 <= v <= 100;
基础思路
之前提到过,当遍历n-1次后,如果没有负权回路,不论再遍历多少次,minDist是不会生成更新的;
所以,我们可以遍历n次,如果第n次minDist需要发生更新,证明就存在负权回路
基础代码
- 时间复杂度O(NM)
- 空间复杂度O(M)
1 | def main(): |
那,如果使用优化代码(邻接表+队列)的方式,应该怎么写的呢?
优化思路
本题可不可 使用 队列优化版的bellman_ford(SPFA)呢?
上面的解法中,我们对所有边松弛了n-1次后,在松弛一次,如果出现minDist出现变化就判断有负权回路。
如果使用 SPFA 那么节点都是进队列的,那么节点进入队列几次后 足够判断该图是否有负权回路呢?
在 0094.城市间货物运输I-SPFA 中,我们讲过 在极端情况下,即:所有节点都与其他节点相连,每个节点的入度为 n-1 (n为节点数量),所以每个节点最多加入 n-1 次队列。
那么如果节点加入队列的次数 超过了 n-1次 ,那么该图就一定有负权回路。
对于某些复杂的 DAG,一个节点的松弛次数达到
n是可能发生的,而这并不一定意味着存在负权环。一个更可靠、更被广泛接受的判断标准是当一个节点的松弛次数超过n时,才断定存在负权环。
所以本题也是可以使用 SPFA 来做的。 代码如下:
1 |
|
以上代码看上去没问题,但提交之后会发现报错了,为什么呢?
例如这组数据:
1 | 4 6 |
如图:

上面代码在执行的过程中,节点4 已经出队列了,但 计算入度会反复计算 节点4的入度,导致 误判 该图有环。
我们需要记录哪些节点已经出队列了,哪些节点在队列里面,对于已经出队列的节点不用统计入度!
所以,我们这里是一定需要添加inQue来判断哪些节点当前正在队列中
而在没有负权回路的情况,可以不使用inQue(如94题目)
致命缺陷:负权回路的“陷阱” ☠️
现在,我们来看看为什么 in_queue 和入队次数统计是必需的。
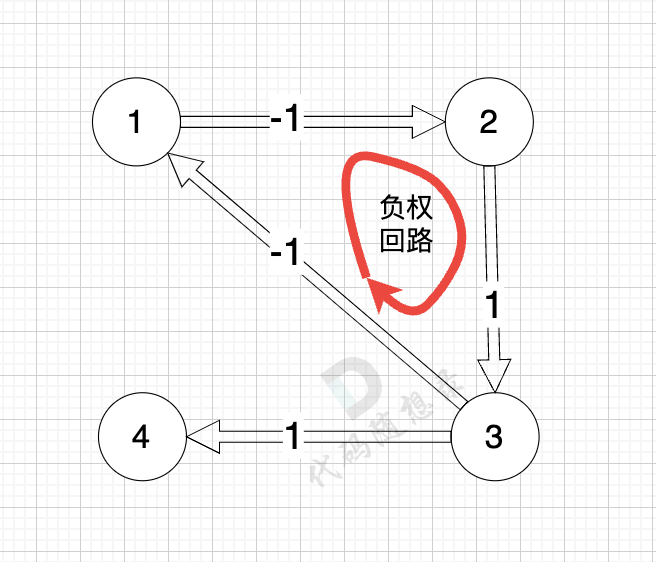
考虑一个简单的负权回路:
节点 A 到 B 的权是 3。
节点 B 回到 A 的权是 -5。
这个 A -> B -> A 的回路总权值为 3 + (-5) = -2。
你的代码会发生什么:
- 程序从某个起点出发,最终更新了
minDist[A]。A被加入队列que。 A出队,用它更新了邻居B的距离minDist[B]。B被加入队列que。B出队,用它更新了邻居A的距离。因为回路是负权的,所以minDist[A]的新值一定比之前更小。于是,A又被加回了队列!A再次出队,它又会去更新B,使minDist[B]变得更小。B又被加回了队列!
这个过程会无限重复下去。每绕一圈,A 和 B 的 minDist 值就会减 2,永无止境。你的 while que: 循环将永远不会结束,程序会超时(Time Limit Exceeded)。
优化代码
1 | class Edge: |
96.城市间货物运输 III
题目描述
某国为促进城市间经济交流,决定对货物运输提供补贴。共有 n 个编号为 1 到 n 的城市,通过道路网络连接,网络中的道路仅允许从某个城市单向通行到另一个城市,不能反向通行。
网络中的道路都有各自的运输成本和政府补贴,**道路的权值计算方式为:运输成本 - 政府补贴。**权值为正表示扣除了政府补贴后运输货物仍需支付的费用;权值为负则表示政府的补贴超过了支出的运输成本,实际表现为运输过程中还能赚取一定的收益。
请计算在最多经过 k 个城市的条件下,从城市 src 到城市 dst 的最低运输成本。
输入描述
第一行包含两个正整数,第一个正整数 n 表示该国一共有 n 个城市,第二个整数 m 表示这些城市中共有 m 条道路。
接下来为 m 行,每行包括三个整数,s、t 和 v,表示 s 号城市运输货物到达 t 号城市,道路权值为 v。
最后一行包含三个正整数,src、dst、和 k,src 和 dst 为城市编号,从 src 到 dst 经过的城市数量限制。
输出描述
输出一个整数,表示从城市 src 到城市 dst 的最低运输成本,如果无法在给定经过城市数量限制下找到从 src 到 dst 的路径,则输出 “unreachable”,表示不存在符合条件的运输方案。
输入示例
1 | 6 7 |
输出示例
1 | 0 |
提示信息
从 2 -> 5 -> 6 中转一站,运输成本为 0。
1 <= n <= 1000;
1 <= m <= 10000;
-100 <= v <= 100;
思路
注意题目中描述是 最多经过 k 个城市的条件下,而不是一定经过k个城市,也可以经过的城市数量比k小,但要最短的路径。
在 kama94.城市间货物运输I 中我们讲了:对所有边松弛一次,相当于计算 起点到达 与起点一条边相连的节点 的最短距离。
节点数量为n,起点到终点,最多是 n-1 条边相连。 那么对所有边松弛 n-1 次 就一定能得到 起点到达 终点的最短距离。
(如果对以上讲解看不懂,建议详看 kama94.城市间货物运输I )
本题是最多经过 k 个城市, 那么是 k + 1条边相连的节点。 这里可能有录友想不懂为什么是k + 1,来看这个图:
图中,节点1 最多已经经过2个节点 到达节点4,那么中间是有多少条边呢,是 3 条边对吧。
所以本题就是求:起点最多经过k + 1 条边到达终点的最短距离。
对所有边松弛一次,相当于计算 起点到达 与起点一条边相连的节点 的最短距离,那么对所有边松弛 k + 1次,就是求 起点到达 与起点k + 1条边相连的节点的 最短距离。
注意: 本题是 kama94.城市间货物运输I 的拓展题,如果对 bellman_ford 没有深入了解,强烈建议先看 kama94.城市间货物运输I 再做本题。
理解以上内容,其实本题代码就很容易了,bellman_ford 标准写法是松弛 n-1 次,本题就松弛 k + 1次就好。
以上代码 标准 bellman_ford 写法,松弛 k + 1次,看上去没什么问题。
但大家提交后,居然没通过!
这是为什么呢?
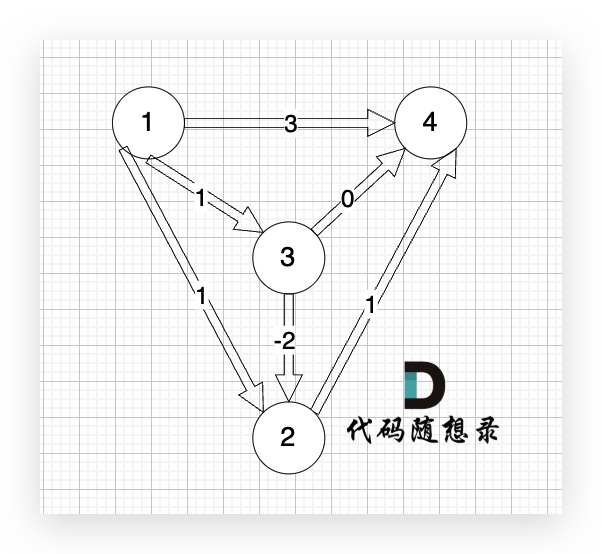
接下来我们拿这组数据来举例:
1 | 4 4 |
(注意上面的示例是有负权回路的,只有带负权回路的图才能说明问题)
负权回路是指一条道路的总权值为负,这样的回路使得通过反复经过回路中的道路,理论上可以无限地减少总成本或无限地增加总收益。
正常来说,这组数据输出应该是 1,但以上代码输出的是 -2。
在讲解原因的时候,强烈建议大家,先把 minDist数组打印出来,看看minDist数组是不是按照自己的想法变化的,这样更容易理解我接下来的讲解内容。 (一定要动手,实践出真实,脑洞模拟不靠谱)
接下来,我按照上面的示例带大家 画图举例 对所有边松弛一次 的效果图。
起点为节点1, 起点到起点的距离为0,所以 minDist[1] 初始化为0 ,如图:

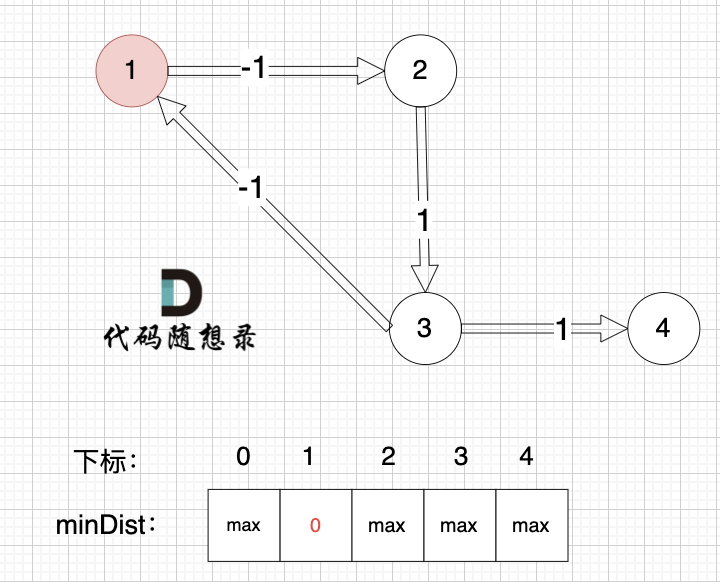
其他节点对应的minDist初始化为max,因为我们要求最小距离,那么还没有计算过的节点 默认是一个最大数,这样才能更新最小距离。
当我们开始对所有边开始第一次松弛:
边:节点1 -> 节点2,权值为-1 ,minDist[2] > minDist[1] + (-1),更新 minDist[2] = minDist[1] + (-1) = 0 - 1 = -1 ,如图:

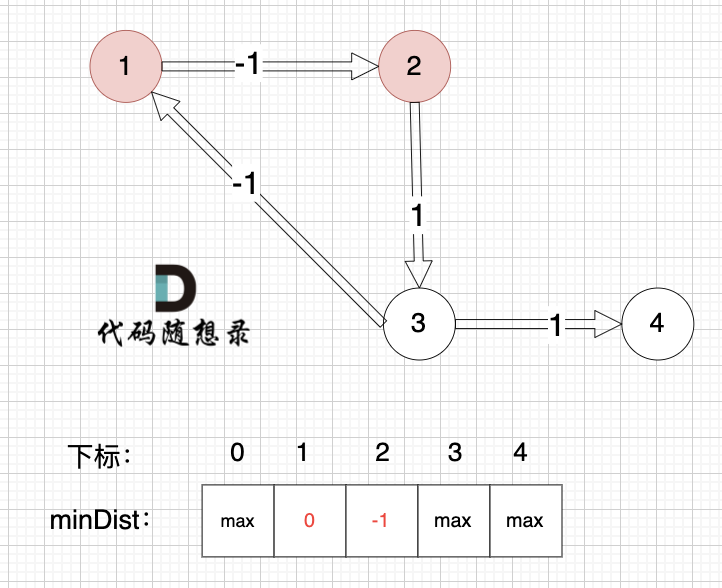
边:节点2 -> 节点3,权值为1 ,minDist[3] > minDist[2] + 1 ,更新 minDist[3] = minDist[2] + 1 = -1 + 1 = 0 ,如图:
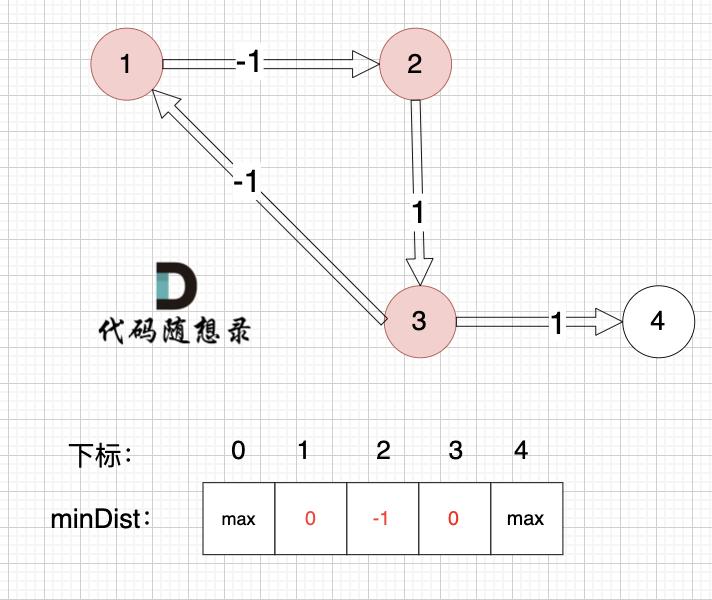

边:节点3 -> 节点1,权值为-1 ,minDist[1] > minDist[3] + (-1),更新 minDist[1] = 0 + (-1) = -1 ,如图:

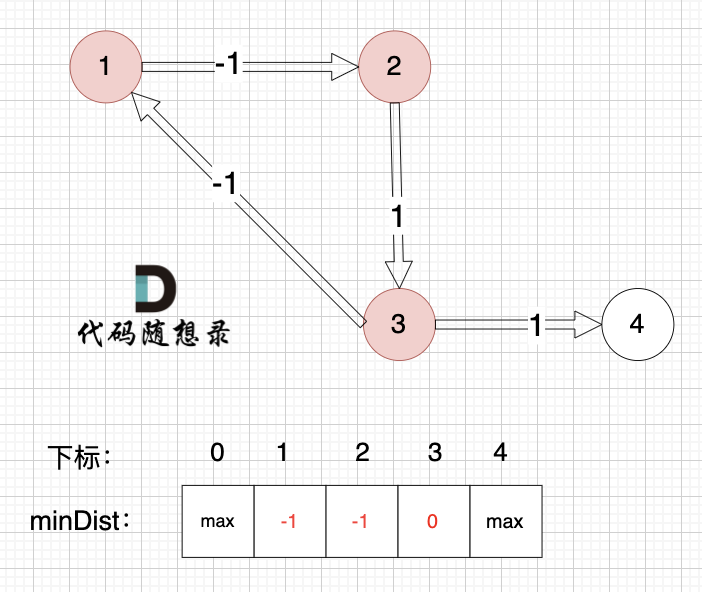
边:节点3 -> 节点4,权值为1 ,minDist[4] > minDist[3] + 1,更新 minDist[4] = 0 + 1 = 1 ,如图:

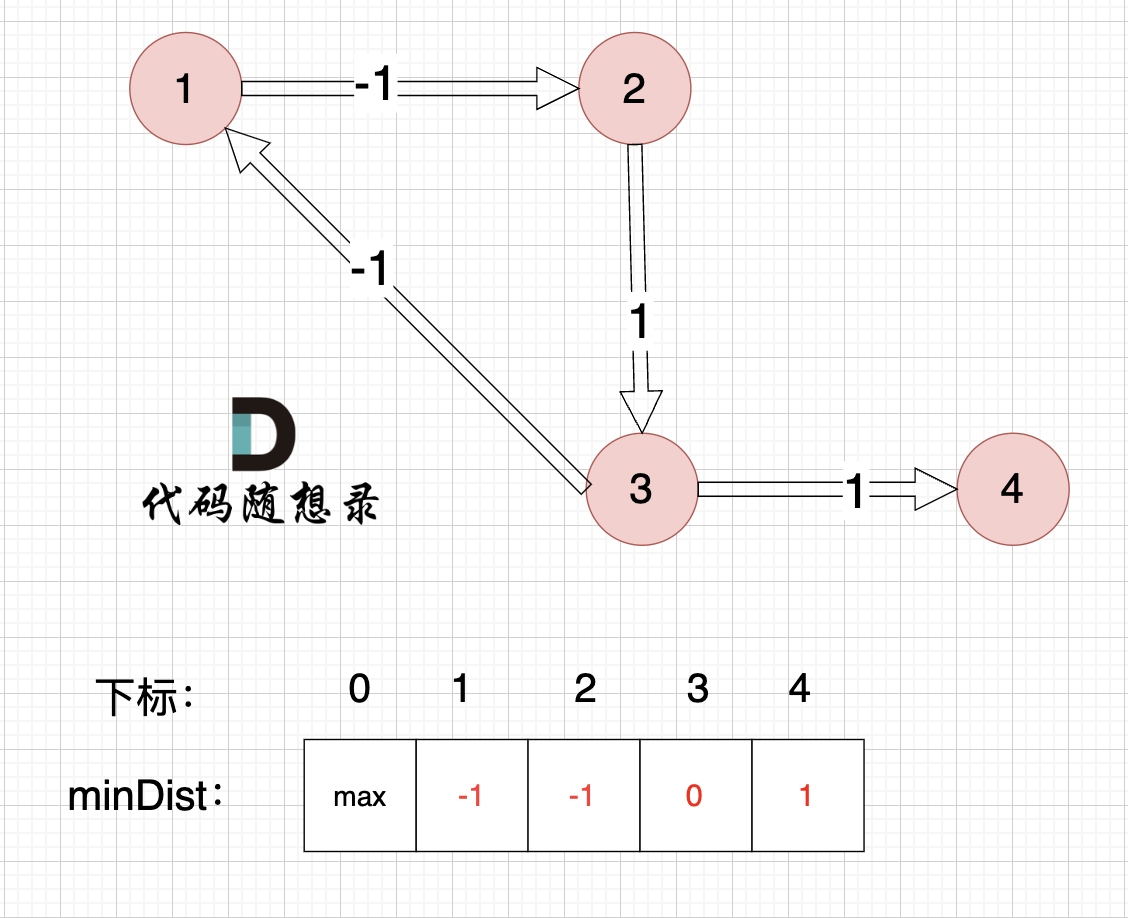
以上是对所有边进行的第一次松弛,最后 minDist数组为 :-1 -1 0 1 ,(从下标1算起)
后面几次松弛我就不挨个画图了,过程大同小异,我直接给出minDist数组的变化:
所有边进行的第二次松弛,minDist数组为 : -2 -2 -1 0 所有边进行的第三次松弛,minDist数组为 : -3 -3 -2 -1 所有边进行的第四次松弛,minDist数组为 : -4 -4 -3 -2 (本示例中k为3,所以松弛4次)
最后计算的结果minDist[4] = -2,即 起点到 节点4,最多经过 3 个节点的最短距离是 -2,但 正确的结果应该是 1,即路径:节点1 -> 节点2 -> 节点3 -> 节点4。
理论上来说,对所有边松弛一次,相当于计算 起点到达 与起点一条边相连的节点 的最短距离。
对所有边松弛两次,相当于计算 起点到达 与起点两条边相连的节点的最短距离。
对所有边松弛三次,以此类推。
但在对所有边松弛第一次的过程中,大家会发现,不仅仅 与起点一条边相连的节点更新了,所有节点都更新了。
而且对所有边的后面几次松弛,同样是更新了所有的节点,说明 至多经过k 个节点 这个限制 根本没有限制住,每个节点的数值都被更新了。
这是为什么?
在上面画图距离中,对所有边进行第一次松弛,在计算 边(节点2 -> 节点3) 的时候,更新了 节点3。

理论上来说节点3 应该在对所有边第二次松弛的时候才更新。 这因为当时是基于已经计算好的 节点2(minDist[2])来做计算了。
minDist[2]在计算边:(节点1 -> 节点2)的时候刚刚被赋值为 -1。
这样就造成了一个情况,即:计算minDist数组的时候,基于了本次松弛的 minDist数值,而不是上一次 松弛时候minDist的数值。
所以在每次计算 minDist 时候,要基于 对所有边上一次松弛的 minDist 数值才行,所以我们要记录上一次松弛的minDist。
代码
1 | def main(): |








